This package has been tested on ROS Noetic, it contains a ROS node that controls motors powered by ez-Wheel Safety Wheel Drive (SWD®) technology.
 |
 |
 |
 |
|---|---|---|---|
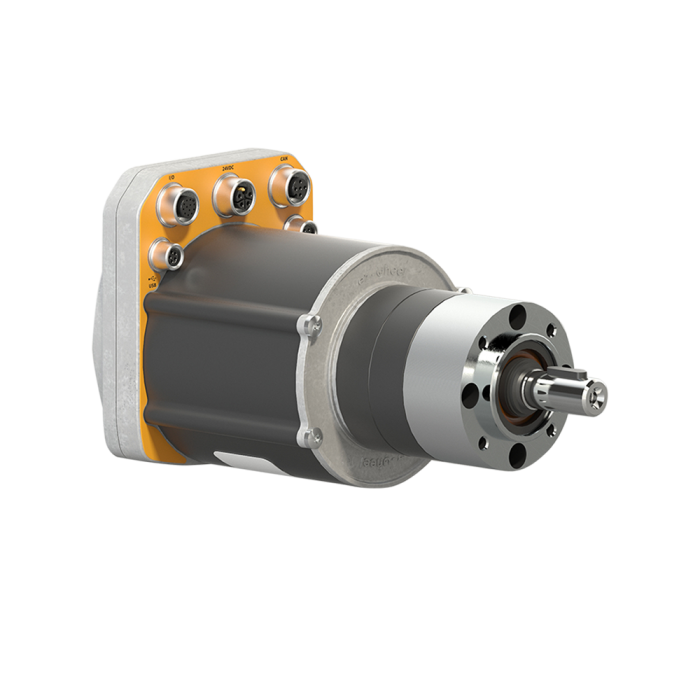
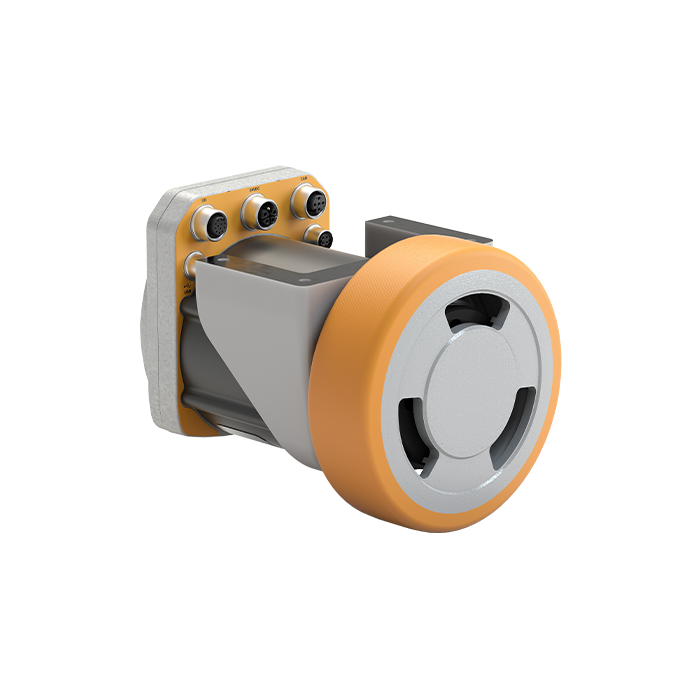
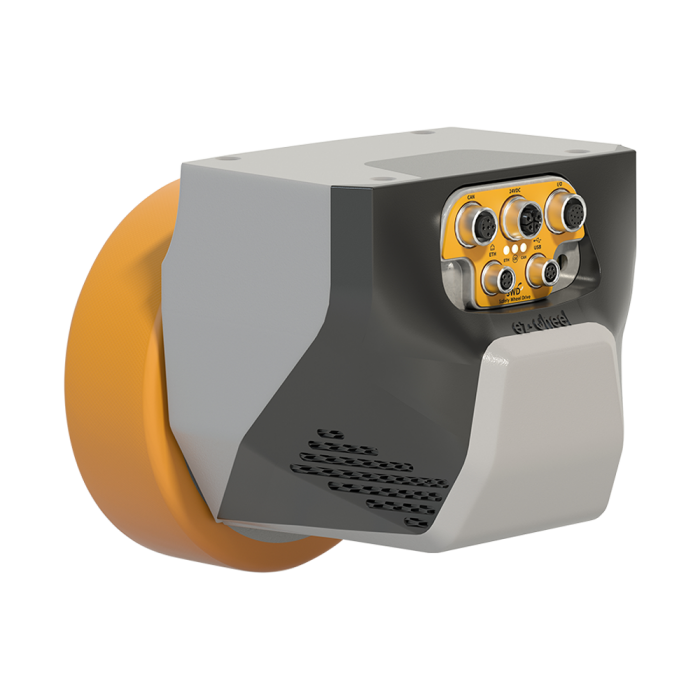
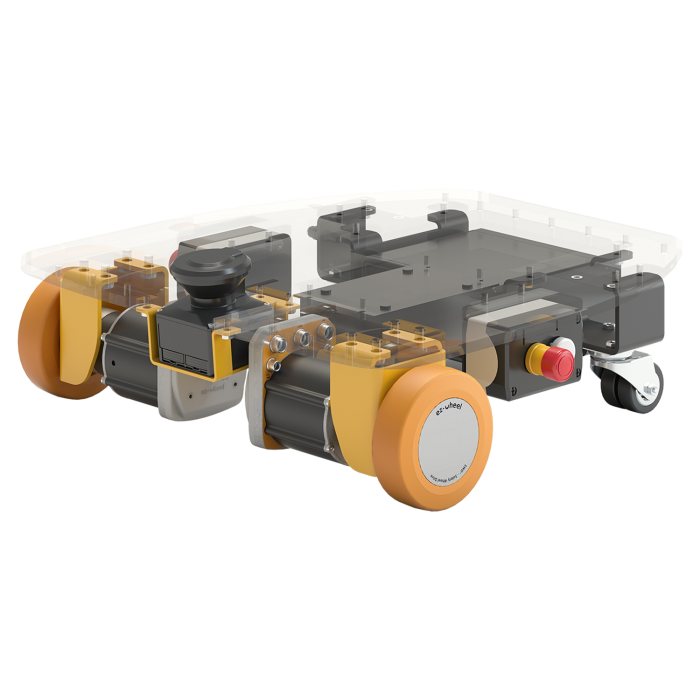
| SWD® Core | SWD® 125 | SWD® 150 | SWD® StarterKit |
| Safety gear motor | Medium duty Safety Wheel Drive | Heavy duty Safety Wheel Drive | Development kit for AGV and AMR |
Users should regularly inform themselves about updates of this driver (Activating GitHub notifications with "Watch", 'All activity' button on top of this page).
- Two SWD® based wheels
SWD firmware(>= 1.0.1)- Ubuntu :
- 20.04 (Focal Fossa) and ROS (Melodic or Noetic)
swd-services(>= 2.0.0)
It is available for the following platforms:
- ARM 32-bits, i.e. armhf debian packages
- ARM 64-bits, i.e. arm64 debian packages, since version 3.3.1
- AMD 64-bits, i.e. amd64 debian packages, for x86 machines
In order to install swd_ros_controllers with apt, you need to add ez-Wheel repository to your Apt sources configuration file as sudo in: /etc/apt/sources.list. Type the following command:
echo "deb http://packages.ez-wheel.com:8081/ubuntu/ $(lsb_release -cs) main" | sudo tee -a /etc/apt/sources.listThen, download and add the GPG key. Type the following command:
sudo bash -c "wget -qO - http://packages.ez-wheel.com:8081/archive.key | gpg --dearmor > /etc/apt/trusted.gpg.d/ez-wheel-keyring.gpg"Now, you should be able to install ez-Wheel's packages using Advanced Packaging Tool (apt):
sudo apt update && sudo apt install swd-services ros-${ROS_DISTRO}-swd-ros-controllersTo compile the package, make sure you added ez-Wheel repository to your Apt sources configuration file as sudo in: /etc/apt/sources.list, as specified above in METHOD 1.
So that you can install required swd-services, by typing:
sudo apt-get update && sudo apt install swd-servicesIn the following instructions, replace <rosdistro> with the name of your ROS distro (e.g., noetic).
source /opt/ros/<rosdistro>/setup.bash
mkdir -p ~/ros_ws/src/
cd ~/ros_ws/src/
git clone https://github.com/IDEC-ezWheel/swd_ros_controllers.git
cd ..
catkin_make install
source ~/ros_ws/install/setup.bashThe package comes with a preconfigured launchfile which can be started using the roslaunch command:
swd_diff_drive_controller.launch: is a launchfile for the SWD® Starter Kit which has a differential kinematic. To use it, run the following command:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ezw/usr/lib
roslaunch swd_ros_controllers swd_diff_drive_controller.launchYou can always use the node with the rosrun command, the minimum required parameters are:
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ezw/usr/lib
rosrun swd_ros_controllers swd_diff_drive_controller _baseline:=0.485The corresponding D-Bus services have to be started in order to use the nodes.
Example with the SWD® Starter Kit:
- The service
ezw-dbus-user-session.serviceis equivalent to running:
dbus-launch > /tmp/SYSTEMCTL_dbus.id ## [OPTIONAL]- Prepare the environment
export $(cat /tmp/SYSTEMCTL_dbus.id) ## [OPTIONAL]
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ezw/usr/lib- The service
ezw-swd-left.serviceis equivalent to running:
/opt/ezw/usr/bin/ezw-smc-service /opt/ezw/usr/etc/ezw-smc-core/swd_left_config.ini- The service
ezw-swd-right.serviceis equivalent to running:
/opt/ezw/usr/bin/ezw-smc-service /opt/ezw/usr/etc/ezw-smc-core/swd_right_config.iniExample of configuration files for SWD® Starter Kit:
# SMC Drive service config file
contextId = 12
nodeId = 4
coreNodeId = 6
coreNodeIsMaster = true # Slave:false Master:true
canDevice = can0
dbusNamespace = swd_left
HWConfigurationEntry = SWD_CORE
HWConfigurationFile = /opt/ezw/data/configuration.json
CANOpenEDSFile = /opt/ezw/usr/etc/ezw-canopen-dico/swd_core.eds# SMC Drive service config file
contextId = 12
nodeId = 5
coreNodeId = 7
coreNodeIsMaster = true # Slave:false Master:true
canDevice = can0
dbusNamespace = swd_right
HWConfigurationEntry = SWD_CORE
HWConfigurationFile = /opt/ezw/data/configuration.json
CANOpenEDSFile = /opt/ezw/usr/etc/ezw-canopen-dico/swd_core.eds[
{
"name": "SWD_CORE",
"nbStepRevolutionElec": 6,
"nbPolePair": 5,
"reduction": 14.0,
"diameter": 125.0
}
]As the minimal SWD® Starter Kit config files do not exist on your IPC, you can install them manually as specified above or install them via a third package.
In this case, make sure you added ez-Wheel repository to your Apt sources configuration file as sudo in: /etc/apt/sources.list, as specified above in METHOD 1.
First, create swd_sk user with sudo rights, with swd_sk as default password:
sudo addgroup swd_sk
sudo useradd -m -s /bin/bash -g swd_sk swd_sk
sudo bash -c 'echo swd_sk:swd_sk | chpasswd'
sudo usermod -aG sudo swd_skThen log in with user swd_sk:
su - swd_skThen install swd-system-config-2wheels using:
sudo apt-get update && sudo apt install swd-system-config-2wheelsThis package will configure your system to start at boot up four new services (with user swd_sk account):
ezw-stack.service: initialize can0ezw-dbus-user-session: initialize D-Bus sessionezw-swd-left.service: start left D-Bus serviceezw-swd-right.service: start right D-Bus service
and add the following config files as specified above :
/opt/ezw/data/configuration.json/opt/ezw/usr/etc/ezw-smc-core/swd_left_config.ini/opt/ezw/usr/etc/ezw-smc-core/swd_right_config.ini
This packages comes also with the commissioning scripts used for each wheels :
/opt/ezw/commissioning/
You can modify them and apply the commissioning using:
cd /opt/ezw/commissioning/
./swd_left_4_commissioning.py
./swd_right_5_commissioning.pyThen refer to "Usage on a SWD® Starter Kit" for more information.
This controller manages two ez-Wheel SWD® wheels as a differential kinetic robot.
baseline_m (mandatory), typedouble: Distance in meters between the 2 SWD wheels.pub_freq_hz, typeint: Frequency in Hertz of odometry and TFs messages publishment.Default = 20.left_swd_config_file (mandatory), typestring: Path to.iniSWD left configuration fileright_swd_config_file (mandatory), typestring: Path to.iniSWD right configuration filecommand_timeout_ms, typeint: Delay in milliseconds before stopping SWD wheels if no command are received.Default = 500.control_mode, typestring: Selects control mode for the robot. IfTwistis selected, the node subscribes to the~cmd_veltopic. If'LeftRightSpeeds'is selected, the node subscribes to~set_speedtopic.Default = Twist.base_frame, typestring: Frame ID for the moving platform, used in odometry and TFs.Default = base_link, (see REP-150 for more info).odom_frame, typestring: Frame ID for theodomfixed frame used in odometry and TFs.Default = odom, (see REP-150 for more info).wheel_max_speed_rpm, typedouble: Maximum speed allowed in RPM wheel for SWD wheel. If the target speed of one is above this limit, the controller limits the speed of both wheels without changing robot's trajectory.Default = 75.0.wheel_safety_limited_speed_1_rpm, typedouble: Safety Limited Speed 1 (SLS_1) (in RPM), if an SLS_1 signal is detected (from a security LiDAR for example), the motor will be limited internally to the configured SLS_1 limit. The ROS controller uses this value to limit the target speed send to the motor in the SLS_1 case (default40.0).wheel_safety_limited_speed_2_rpm, typedouble: Safety Limited Speed 2 (SLS_2) (in RPM), if an SLS_2 signal is detected (from a security LiDAR for example), the motor will be limited internally to the configured SLS_2 limit. The ROS controller uses this value to limit the target speed send to the motor in the SLS_2 case (default48.5).wheel_max_delta_speed_rpm, typedouble: Maximum allowed delta speed between both SWD wheels (in RPM). If the speed difference between both wheels is above the limit, the controller will limit the speed of the two wheels without changing robot's trajectory.Default = 37.5(wheel_max_speed_rpm / 2).have_backward_sls, typebool: Configures if the robot has a backward SLS signal (e.g. from a back-facing security LiDAR). If so, set this parameter totrue. Otherwise, set the parameter tofalse, and this will limit backward movements towheel_safety_limited_speed_rpmspeed.Default = false.left_encoder_relative_error, typedouble: Relative error for left wheel encoder, used to calculate variances and propagate them to calculate the uncertainties in the odometry message. Each encoder acquisitionDIFF_LEFT_ENCODERis modeled as:DIFF_LEFT_ENCODER +/- abs(left_encoder_relative_error * DIFF_LEFT_ENCODER).Default = 0.02corresponding to 5% of error.right_encoder_relative_error, typedouble: Relative error for right wheel encoder, used to calculate variances and propagate them to calculate the uncertainties in the odometry message. Each encoder acquisitionDIFF_RIGHT_ENCODERis modeled as:DIFF_RIGHT_ENCODER +/- abs(right_encoder_relative_error * DIFF_RIGHT_ENCODER).Default = 0.02corresponding to 5% of error.publish_odom, typebool: Publish odometry messages.Default = true.publish_tf, typebool: Publish odometry TF.Default = true.publish_safety_functions, typebool: Publishswd_ros_controllers::SafetyFunctionsmessage.Default = true.accurate_odometry, typebool: Is available from firmware version >= 1.2.0. Configures wether to use inforation from safe encoder (30ppr) or an unsafe but more accurate encoder (120ppr).
/cmd_velof typegeometry_msgs::Twist: Target linear and angular velocities.Default control_mode:='Twist'./set_speedof typegeometry_msgs::Point: Target speeds in rad/s for left (Point.x) and right (Point.y) wheels (whencontrol_mode:='LeftRightSpeeds')./soft_brakeof typestd_msgs::Bool: Activate or release the soft brake, sendfalseto release the brake, ortrueto activate it.
/odomof typenav_msgs::Odometry: Odometry message based on wheels encoders, containing the pose and velocity of the robot with their's associated uncertainties. Unless disabled by thepublish_tfparameter, TFs with the same information are also published./safetyof typeswd_ros_controllers::SafetyFunctions: SafetyFunctions message, the message includes information about Safety functions status.
This message provides information about the state of the Safety functions.
The value is True if the safety function is enabled.
Header header
bool safe_torque_off # Safe Torque Off (STO)
bool safe_brake_control # Safe Brake Control (SBC)
bool safety_limited_speed_1 # Safety Limited Speed 1 (SLS_1)
bool safety_limited_speed_2 # Safety Limited Speed 2 (SLS_2)
bool safe_direction_indication_forward # Safe Direction Indication (positive)
bool safe_direction_indication_backward # Safe Direction Indication (negative)
The main safe drive function is the STO whereby the immediately torque-off on the motor may be accompanied by an SBC command to close the brakes. The SLS functions cause the drive to decelerate (if required) and monitor whether the velocity is held within the defined limits. The functions SDIp and SDIn enable the motor movement only in the corresponding (positive or negative) direction.
For any questions, open a GitHub issue.
ez-Wheel® is an innovative company founded in 2009 and located in Angoulême, France. ez-Wheel has developed the first industrial wheel drive, integrating motorisation, embedded electronics and batteries.
This revolutionary solution, which quickly turns any manually handled platform into an electrically assisted one. Our solutions have been adopted by hundreds of end-users to improve productivity and prevent work accidents caused by manual handling. Our products are used in a variety of applications, in fields of Automotive, Factory logistics, Warehouses, Food processing, Hospitals and Pharmaceutical industries.
SWD® products tackles industrial robotics applications, like Autonomous Mobile Robots (AMRs) and Automatic Guided Vehicles (AGVs). It provides a unique solution for safety critical systems, with safety features related to the ISO 3691-4 standard.
ez-Wheel® has developed a unique know-how in embedded electronics, including safety critical systems, applied to battery powered electric traction.
sudo apt update && sudo apt install swd-servicesCheck if other swd-packages can be upgraded:
sudo apt search swd-Before applying commissioning, stop swd_diff_drive_controller node.
Then, execute again python scripts in the commissionning directory:
systemctl stop ezw-ros-bringup
./swd_"[...]"_commissioning.pyexport LD_LIBRARY_PATH=/opt/ezw/usr/lib
export $(cat /tmp/SYS*.id)
sudo systemctl restart ezw-swd-left.service ezw-swd-right.serviceUse remote.py script installed with swd-services package in /opt/ezw/usr/sbin directory, with its dbusNamespace as argument, e.g.:
/opt/ezw/usr/sbin/remote.py smc_drive
/opt/ezw/usr/sbin/remote.py swd_left
/opt/ezw/usr/sbin/remote.py swd_rightsudo ip link set down can0
sudo ip link set can0 up type can bitrate 1000000 restart-ms 100
sudo ip link set can0 txqueuelen 1000