More detailed examples and descriptions are given below. Further examples can be found in the gallery section.
When plotting clusters or routes from JSON files we need to first identify where
the necessary information is stored within the JSON structure. For this, we can
use the test mode of nextplot.
nextplot test --helpLet's look at data/hamburg-route.json. The relevant data (routes as list of
points) is stored as follows.
{
"state": {
"drivers": [
{
"geometry": {
"coordinates": [
[7.445303531392447, 51.49135302624266],
[7.447852883113915, 51.48998800466363],
[7.447056459334395, 51.48748598974504],
[7.446920673259998, 51.48822589325628],
[7.446382930568115, 51.48952134441981],
[7.445632420473728, 51.48962184633942]
]
}
}
]
}
}Hence, we should be able to extract the routes with the following JSON path:
state.drivers[*].geometry.coordinates[*]. Let's test it by invoking the test
mode. Adding the --stats flag will give us the number of routes found.
nextplot test \
--input data/hamburg-route.json \
--jpath "state.drivers[*].geometry.coordinates" \
--statsThe result should be all the expected lists of routes. For the given example
271 matches should be returned.
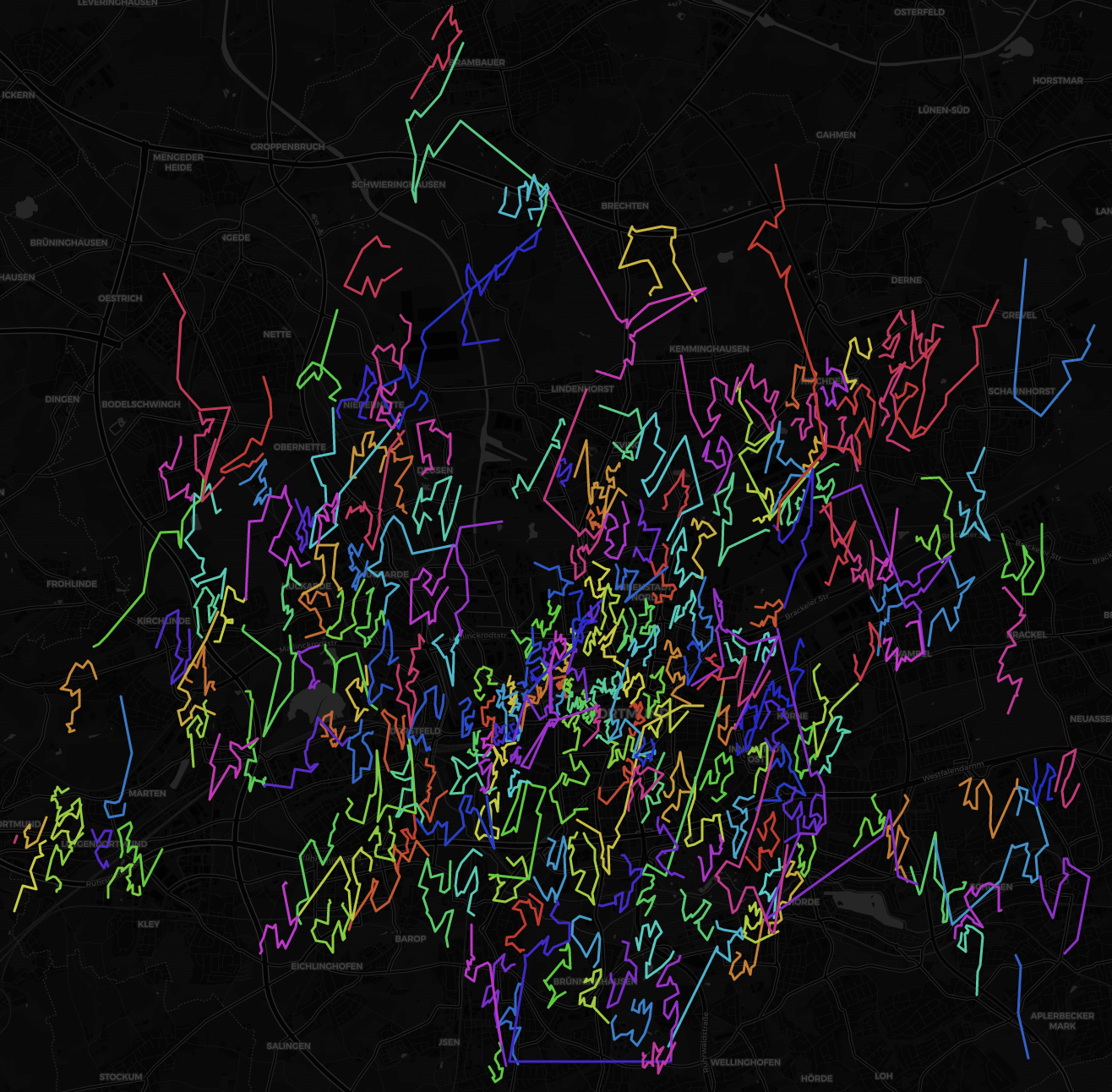
Now let's plot some routes. We will be using data/dortmund-route.json as
sample input data. The file contains the same structure as the Hamburg example
above. Hence, we can use the same jpath. We can get our plot with this:
nextplot route \
--input_route data/dortmund-route.json \
--jpath_route "state.drivers[*].geometry.coordinates"The output at stdout should be:
Route stats
Route count: 271
Route stops (max): 29
Route stops (min): 1
Route stops (avg): 21.365313653136532
Route length (max): 8.344633870323412
Route length (min): 0
Route length (avg): 2.1533391639934014
Plotting image to data/dortmund-route.json.png
Plotting map to data/dortmund-route.json.htmlThe output contains some statistics and shows that the plot files have been
written to data/<original_name>.png & data/<original_name>.html. At default,
the plots are written to the same directory as the input file using its name.
This can be changed via the --output_image & --output_map parameters.
The map plot should look like this:
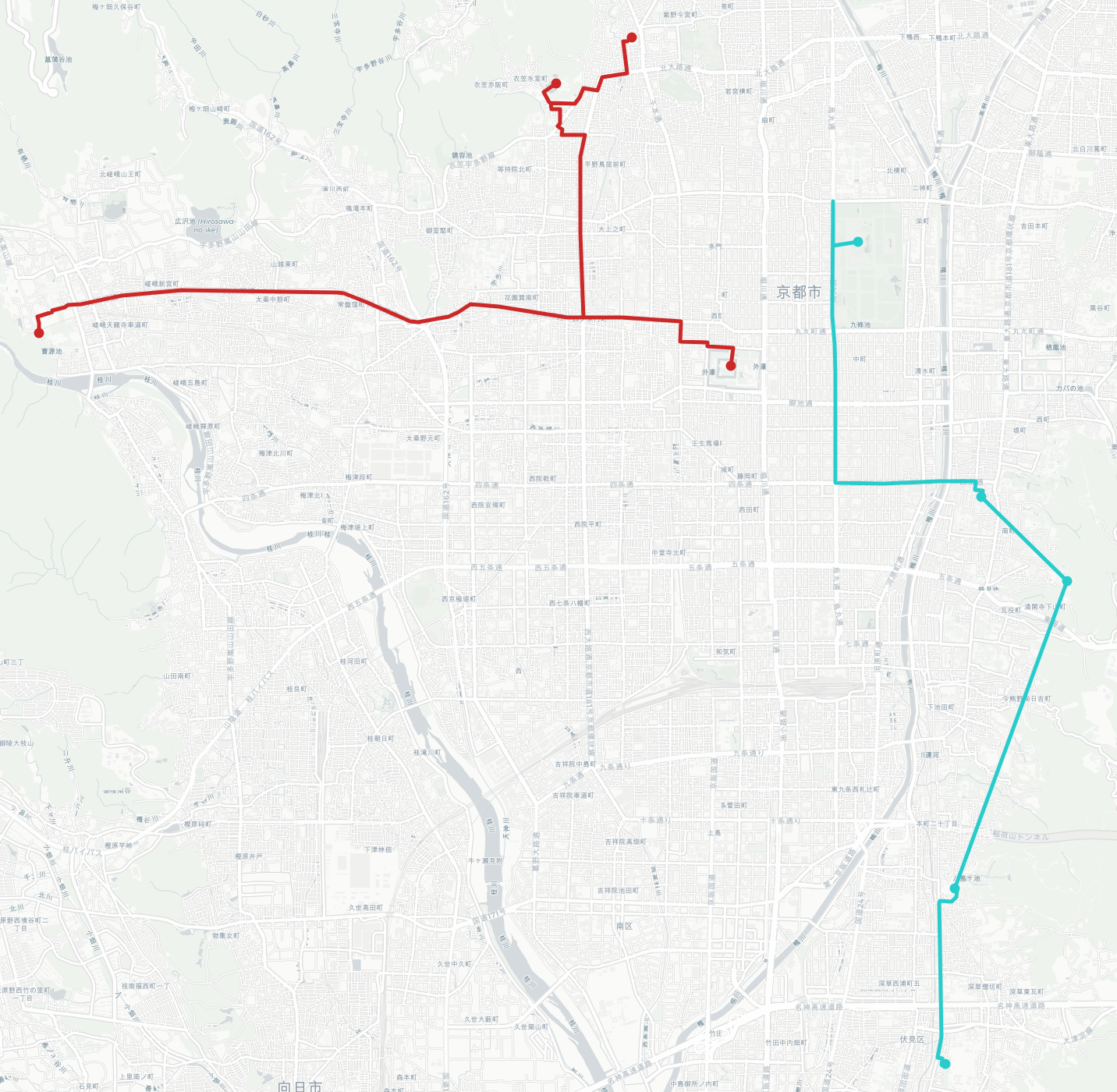
Next, we will plot routes using the road network. We do this with the support of OSRM. Make sure a server with a suitable region and profile is running.
- Spin up an OSRM server with a suitable region and profile. Follow the steps provided by OSRM to get started.
The command is similar to the one above, but specifies some extra options (refer
to the full list below). The osrm_host option
activates OSRM driven plotting.
nextplot route \
--input_route data/kyoto-route.json \
--jpath_route "vehicles[*].route" \
--jpath_x "position.lon" \
--jpath_y "position.lat" \
--output_map kyoto-route.html \
--output_image kyoto-route.png \
--osrm_host http://localhost:5000Another option to plot routes is to use the go-routingkit library which comes with a standalone binary. This approach does not need a running server, but takes longer to compute the routes (as it needs to preprocess the osm file on each run).
-
Install go-routingkit standalone:
go install github.com/nextmv-io/go-routingkit/cmd/routingkit@latest
-
Download suitable osm file of containing all locations (e.g. Kansai region for Kyōto example):
wget -N http://download.geofabrik.de/asia/japan/kansai-latest.osm.pbf
The command is similar to the one above, but specifies some extra options (refer
to the full list below). The rk_osm option
activates routingkit driven plotting.
nextplot route \
--input_route data/kyoto-route.json \
--jpath_route "vehicles[*].route" \
--jpath_x "position.lon" \
--jpath_y "position.lat" \
--output_map kyoto-route.html \
--output_image kyoto-route.png \
--rk_osm kansai-latest.osm.pbfThe map plot should look like this:
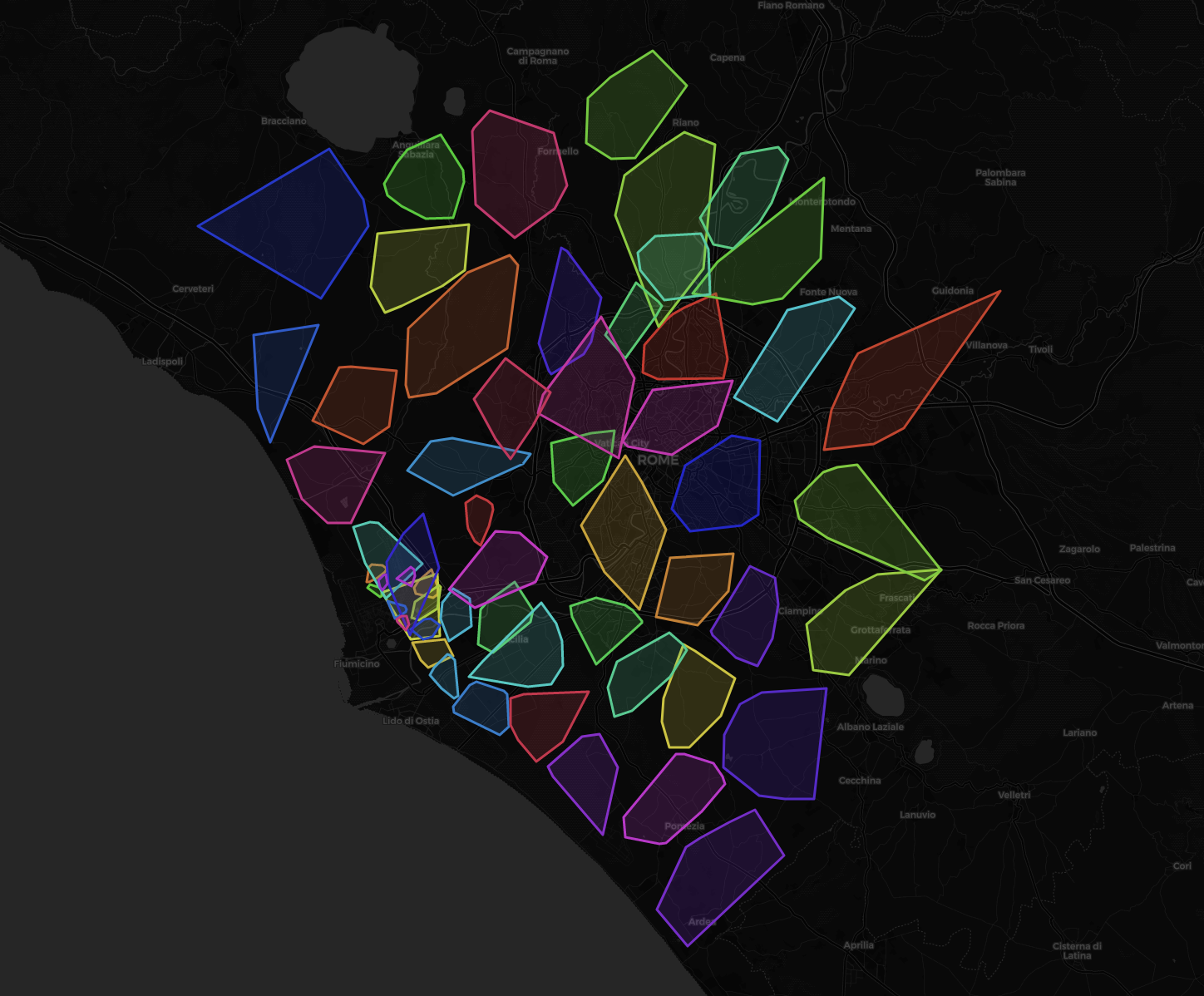
Now let's move on to plotting some clusters. We will use
data/rome-cluster.json as an example. Unfortunately, the file does not contain
the positions for the points itself. It does contain the indices of the points
to plot though. Looking at the file we know we can extract them via
state.clusters[*].points. (note: some data was removed from the preview below)
{
"state": {
"clusters": [
{
"centroid": [-88.13468293225804, 41.81753548064515],
"points": [
51,
65,
148
]
}
]
}
}Now we need the actual positions of the points at these indices. We can get
them from the data/rome-point.json file. The JSON structure is very simple. We
can find the list of points at points. The assumption here is that the indices
of the file above are in line with the order of points in this file.
{
"depot": 0,
"neighbors": 500,
"points": [
[12.450535369539924, 41.82296871624285],
[12.244249981200547, 41.81779915932505]
]
}Since we have two files, we also have separate inputs and jpaths. There are
--input_pos & --jpath_pos available for the position information and
--input_cluster & --jpath_cluster for the cluster information.
This is all information we need. The following command will give us the plots:
nextplot cluster \
--input_cluster data/rome-cluster.json \
--jpath_cluster "state.clusters[*].points" \
--input_pos data/rome-point.json \
--jpath_pos "points"Command output:
Cluster stats
Total points: 1622
Cluster count: 57
Cluster size (max): 35
Cluster size (min): 11
Cluster size (avg): 28.45614035087719
Cluster size (variance): 26.28316405047707
Cluster diameter (max): 16.17086445602463
Cluster diameter (min): 1.0249801072810207
Cluster diameter (avg): 6.762504023482336
Sum of max distances from centroid: 226.9416857406218
Max distance from centroid: 11.637893312799743
Sum of distances from centroid: 2807.765322949338
Sum of squares from centroid: 7723.523174962022
Bad assignments: 139
Plotting image to data/rome-cluster.json.png
Plotting map to data/rome-cluster.json.htmlWe again get some statistics about our clusters and the plots are also available at the data file location.
The map plot should look like this:
Above descriptions should cover most route/cluster plotting needs. However, there are more options for steering the resulting plots towards your needs or handle certain data formats. Find an outline of these options here:
--coords [{euclidean,haversine,auto}]: There are different modes (euclidean,haversine&auto) how coordinates are processed. These can be selected via--coords.euclideanuses euclidean distance for measuring route characteristics and deactivates html-map plotting.haversineuses haversine distance for measuring route characteristics and activates html-map plotting. In this mode coordinates are required to be valid lon/lat. I.e., x, y need to be from the ranges [-180, 180], [-90, 90]autoresults in haversine, if coordinates are valid lon/lat. Otherwise, euclidean will be used.
--omit_start&--omit_end: If the input file contains routes starting and/or ending at a depot, many routes will overlap and long lines will be shown. To avoid these confusing plots--omit_start&--omit_endcan be activated. These will simply cause the first and/or last stop of a route to be omitted.--swap:nextplotexpects positions to be given in (x,y) / (lon,lat) manner. If the positions are in the opposite order, they can be reversed by using the--swapflag.--sort_color: Routes and clusters are all colored using the same saturation & brightness. The hue value is uniformly distributed among them and set in the same order as the routes/clusters appear. For a rainbow like effect colors may be sorted clockwise by the route/cluster centroids using the--sort_colorflag.--colors: Specifies the color profile. Can simply be a preset likecloudandrainbow, but there are also customization modes:gradient: performs a color gradient from one color to another, e.g.,gradient,419AA8,092940(it is possible to define multiple colors like this:gradient,FFFFFF,419AA8,092940,333333)rainbow: performs a rainbow from first hue-value to second using the saturation and value settings, e.g.,rainbow,140,180,0.6,0.7
--custom_map_tile: When plotting interactive mapsnextplotuses the default OSM map tiles (more details) and CartoDB Dark Matter (black to focus colored routes/cluster). Additional custom map tiles can be added via--custom_map_tile [CUSTOM_MAP_TILE]. An overview can be found here: folium-tiles.-
Custom tile providers can even be used by supplying them in the format
"<tile-url>,<layer-name>,<attribution>". Example:--custom_map_tile "https://{s}.basemaps.cartocdn.com/dark_nolabels/{z}/{x}/{y}{r}.png,DarkMatter no labels,OpenStreetMap authors"(an overview of custom tile providers can be found here)
-
--jpath_x&--jpath_y:nextplotexpects to find arrays of points or indices, if a path likestate.drivers[*].geometry.coordinatesis given. I.e., either[[7.44, 51.49], [7.44, 51.48], ...]or[[24, 400, ...]]are expected. However, sometimes route/cluster objects are more complex. For example, a list of named lon/lat like the following, may be given at the path above:{ "lon": 7.44, "lat": 51.49 }(instead of[7.44, 51.49]). In order to extract the positions from the nested structure we use--jpath_x lon&--jpath_y lat.--jpath_unassigned(route only): Path to the array of unassigned points. If provided and points are found, they will be plot separately.--jpath_unassigned_x&--jpath_unassigned_y(route only): Same as--jpath_x&--jpath_y, but for the unassigned points.--route_direction(route only): Specifies how to indicate route direction. Can be one ofnone(no route direction indication),arrow(arrows drawn onto the route) andanimation(animated route flow). By default, route directions are not annotated.--route_animation_color(route only): Specifies the background color for the two color route direction animation. Colors can be provided as hex strings without the leading#, e.g.,000000. The default animation background color is white (FFFFFF).--weight_route <factor>(route only): The thickness of the routes can be controlled by theweight_routefactor. For example, a factor of 2 doubles the thickness.--no_points(cluster & route): The--no_pointsflag may be used to skip plotting the actual points in addition to the clusters / routes.--weight_points(cluster & route): The size of the individual points is controlled via theweight_pointsfactor. For example, a factor of 2 doubles the point diameter.--start_end_markers(route only): The--start_end_markersflag may be used to mark the first and last stops of the routes.--stats_file <path-to-file>: If provided, statistics will be written to the given file in addition to stdout.osrm_host(route only): Host of the OSRM server to be used for routing. If provided, routes will be generated via OSRM. Example:http://localhost:5000.rk_bin(route only): Path to the go-routingkit standalone binary. Alternatively,routingkitcommand will be used at default (requires go-routingkit installation).rk_osm(route only): Path to the OpenStreetMap data file to be used for routing. All points must be contained within the region of the file. This file is mandatory when using routingkit. Furthermore, this switch activates road level routes, if provided.rk_profile(route only): Profile used to generate paths via routingkit. Can be one of car, bike & pedestrian.rk_distance(route only): If given routingkit costs will be returned in distance instead of duration.