CHUCK
The CHUCK is basically a Un*x computer with an ARM core. The OS is very similar to Android, but you can only access it through a shell.
It is also used on the Bebop drones. Recommended reading: Bebop Hacking guide (PDF).
- turn Disco on On firmware > 1.7.0:
- double-press the power button; first press is blinks green, second it blinks purple-blue-purple-blue
- connect to Disco's wifi
- telnet to 192.168.41.1
Read on:
- 21
- 51
- 8888 ?
The right USB-port supports OTG without issues.
left USB port does not seem to power devices - UNLESS you plug USB hub into it?
The USB-ports are Micro-USB AB; they are a tiny bit larger than micro B, because they are missing the chamfer. They are backwards compatible but feel less tight. This is especially a problem when flying with a Disco4g-modem connected.
Kristian @ slack:
it is part number 475890001 or 475891001 from molex (identical parts) https://www.molex.com/pdm_docs/sd/475890001_sd.pdf https://www.molex.com/pdm_docs/sd/475891001_sd.pdf
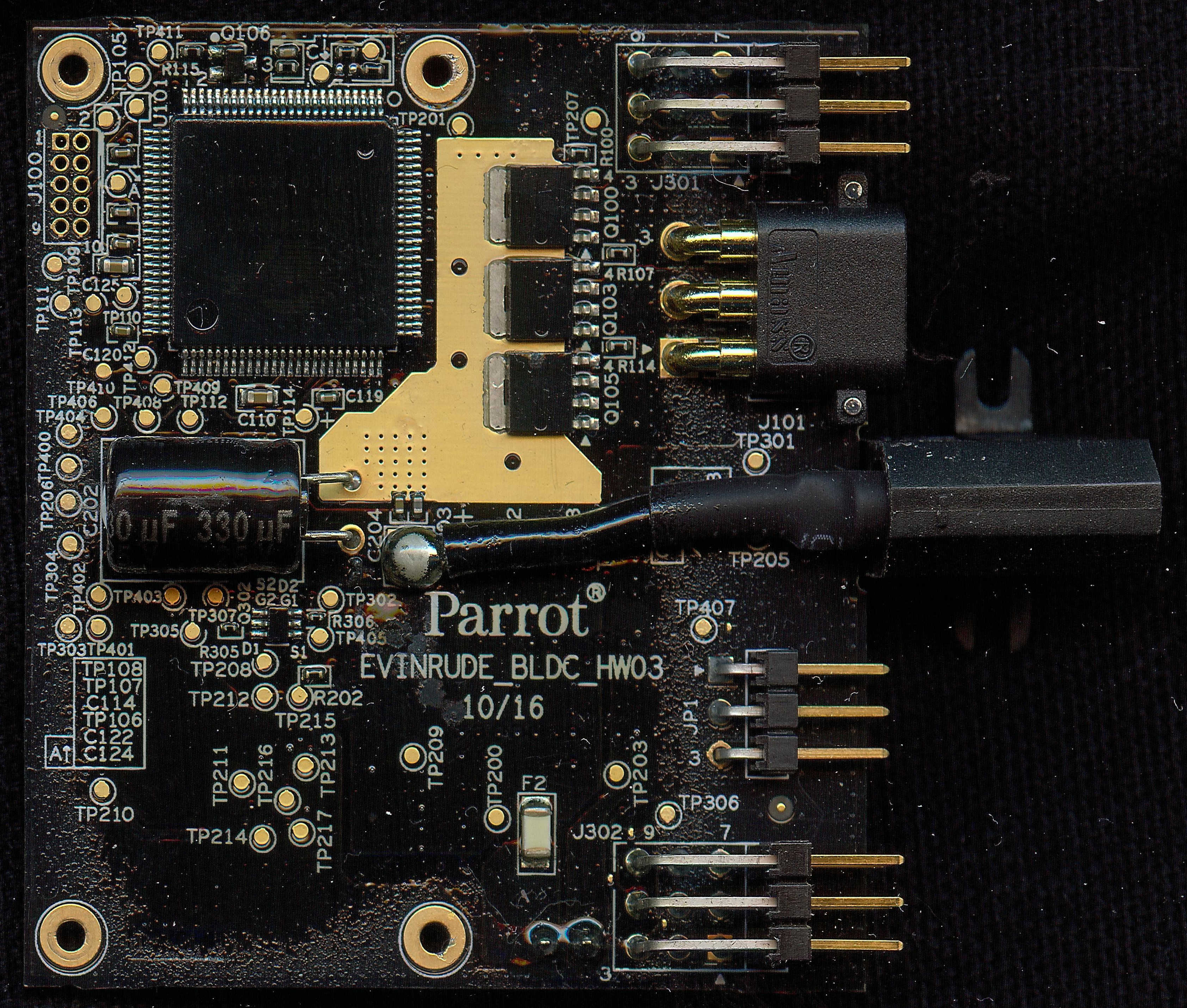
There are three circuit boards in the CHUCK:
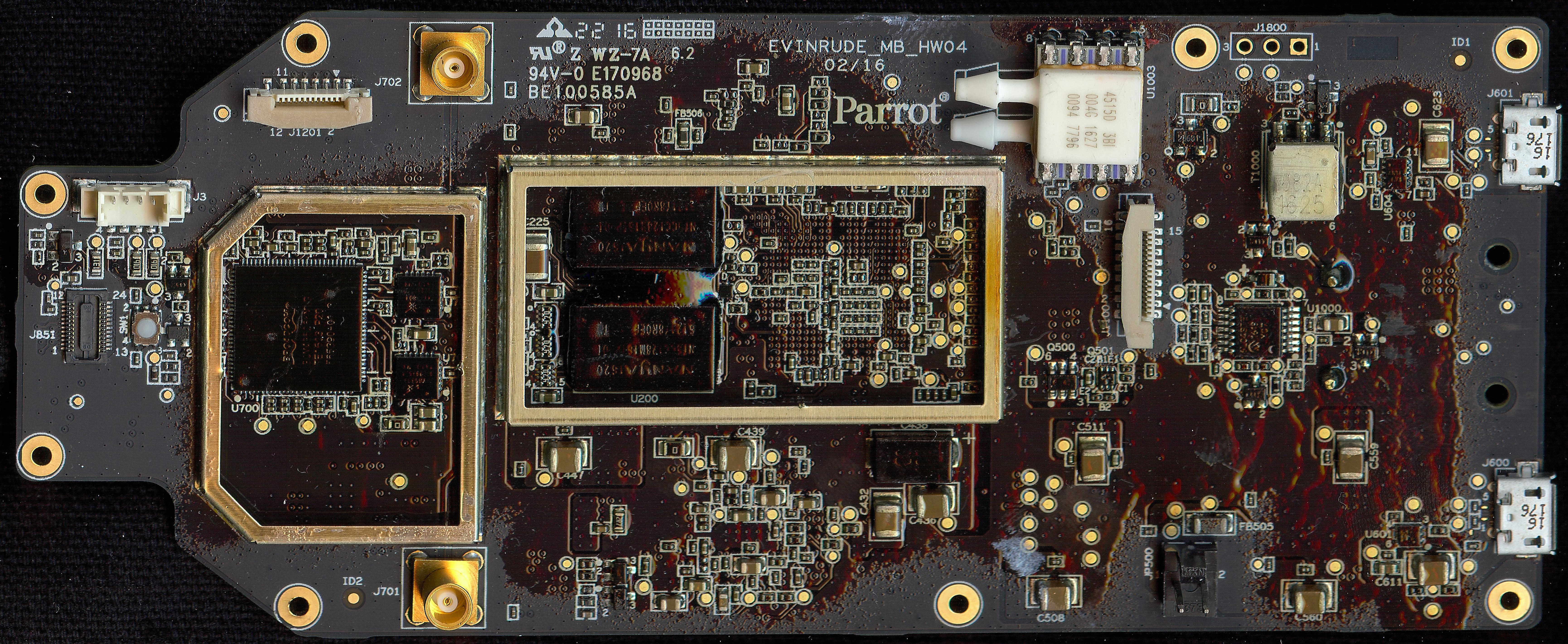
- RAM (U200): Nanya NT5CC128M16JR-DI 2Gbit DD3 DRAM
- Air speed sensor (U1003): TE MS4515DO pressure transducer
- Wifi chip (U700): Broadcom BCM43525 3x3 11ac Dual-band Radio
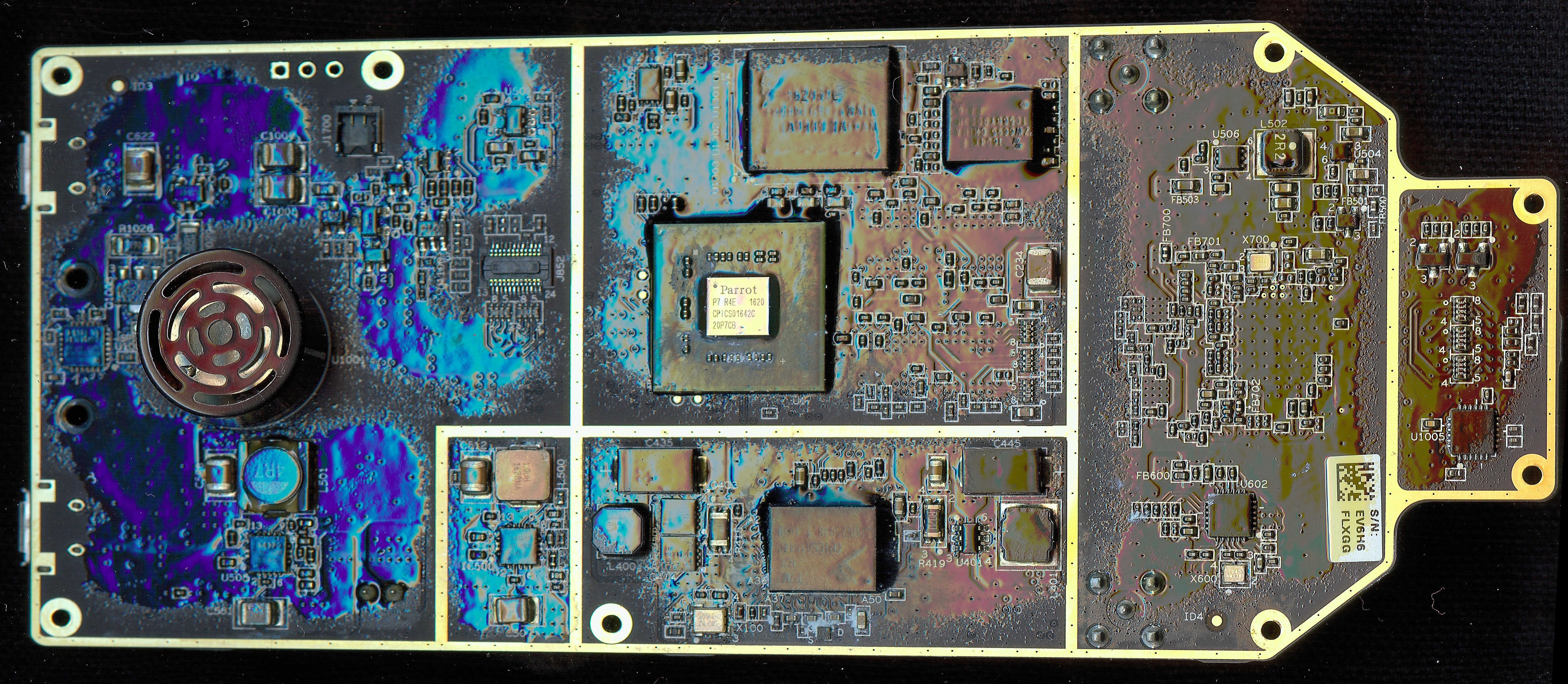
- Main CPU (U1): Parrot P7 custom chip with ARMv7 core
- Co-processor (U obscured): Parrot P7MU: Holds ADC, temperature sensor etc.
- eMMC (U1300): Kioxia THGBMJG8C2LBAIL 32GB
- Flash ROM (U obscured): Kioxia TC58BYG0S3HBAI6 1 Gbit SLC NAND memory
- USB hub (U602): Microchip/SMSC USB2442 2-Port USB 2.0 Hi-Speed Hub Controller
- IMU (U1004 & U1005): 2 x Invensense MPU-6050 Six-Axis (Gyro + Accelerometer) MEMS MotionTracking Device
- Ultrasonic transducer (U1001): Model unknown
- Front camera: ON Semiconductor MT9F002 1/2.3‐inch 14 Mp CMOS Digital Image Sensor
- Down camera: ON Semiconductor MT9V117 1/6-inch 0.3 Mp CMOS Digital Image Sensor
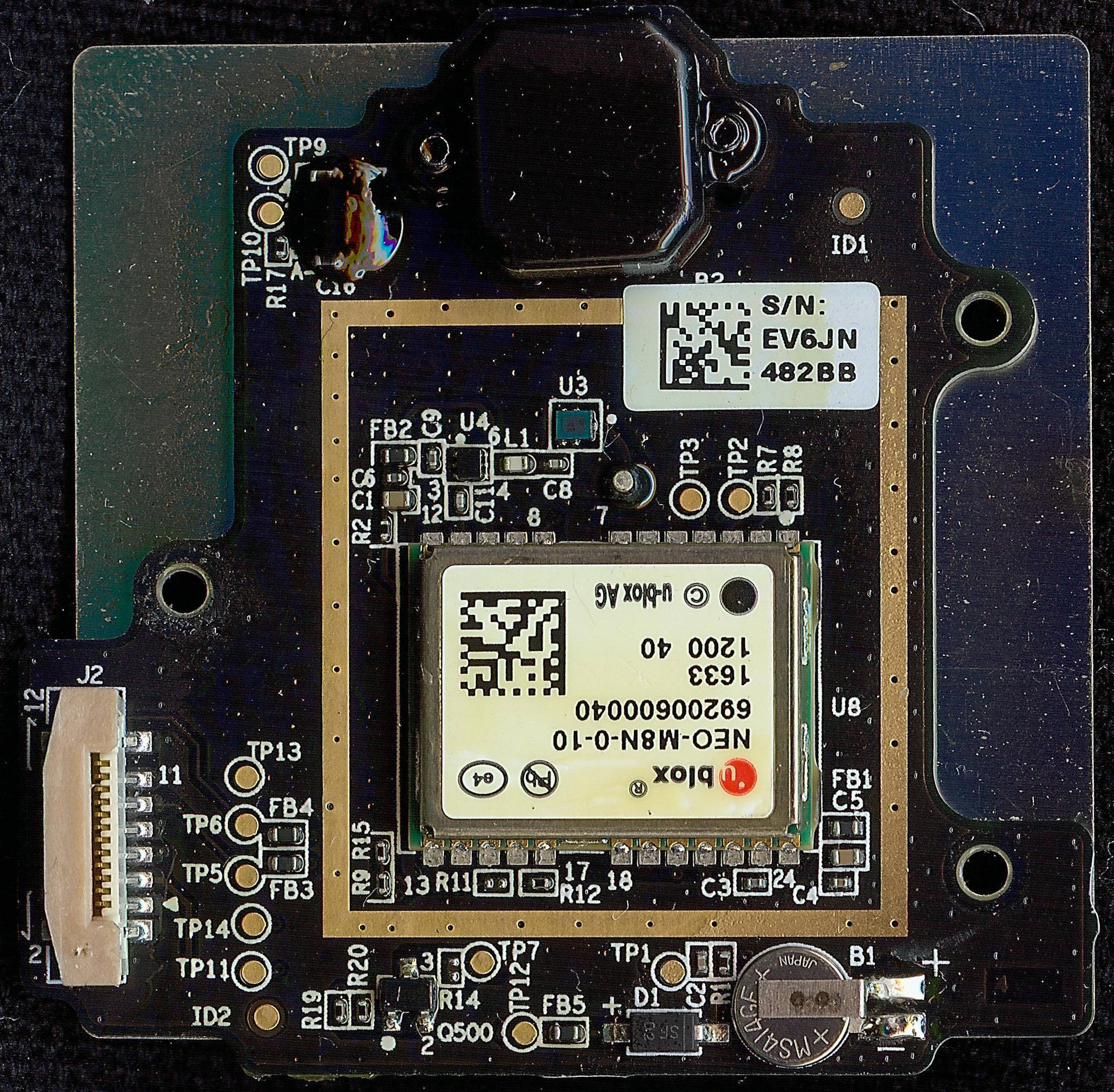
The top of the GPS board is just the GPS antenna.