C++ Lane Detection Using OpenCV
This project implements a lane detection system using OpenCV in C++. The system processes both images and videos to detect lane markings on the road. It includes functionality for perspective mapping, image processing, and lane marking detection.
- Image and Video Processing: Detect lanes in both images and videos.
- Perspective Mapping: Transform the road view to a bird's-eye view.
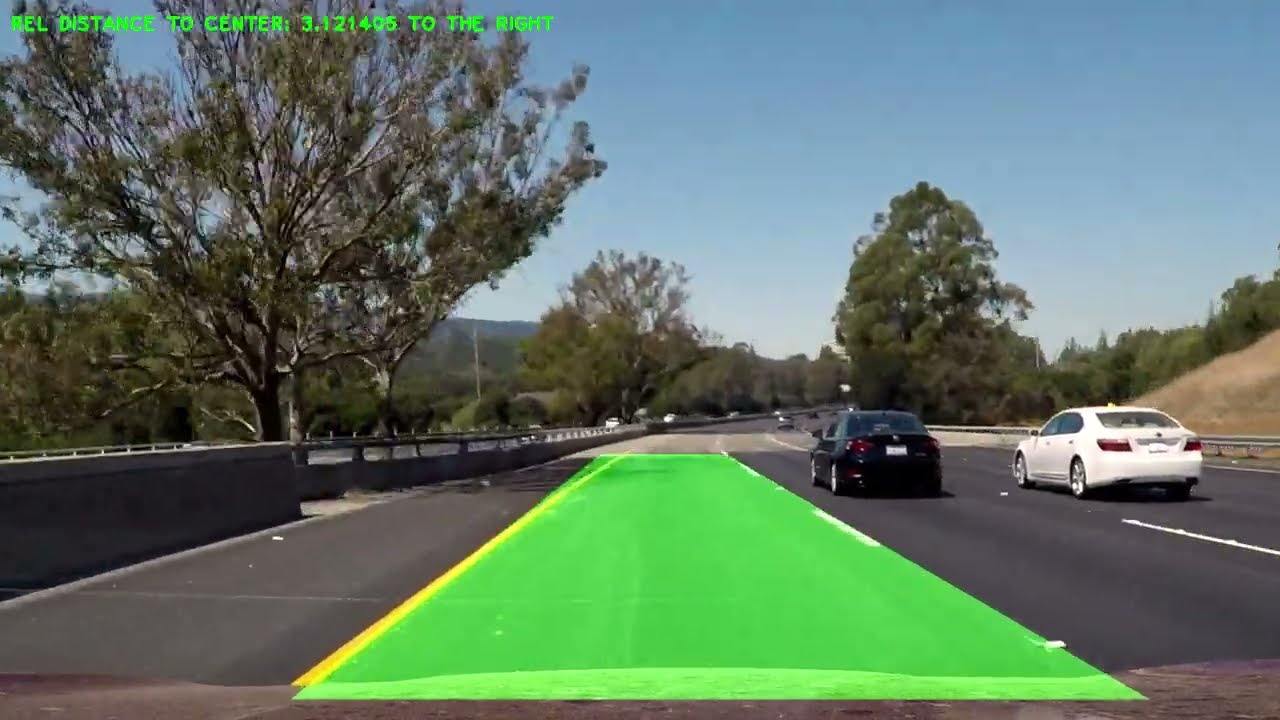
- Lane Detection: Identify the left and right lane markings.
- Data Based Calculations: Calculate the relative distance to the lane center and relative lane deviation.
- User Interface: Basic console interface for changing settings.
- OpenCV (version 4.5.0 or higher recommended)
- C++17 or higher