APIs for managing SWD® (Safety Wheel Drive) drive
This repository provides the documentation of the APIs provided in the linux debian package swd-services. These APIs can be used to control and configure the SWD® (Safety Wheel Drive) powered by ez-Wheel.
 |
 |
 |
 |
|---|---|---|---|
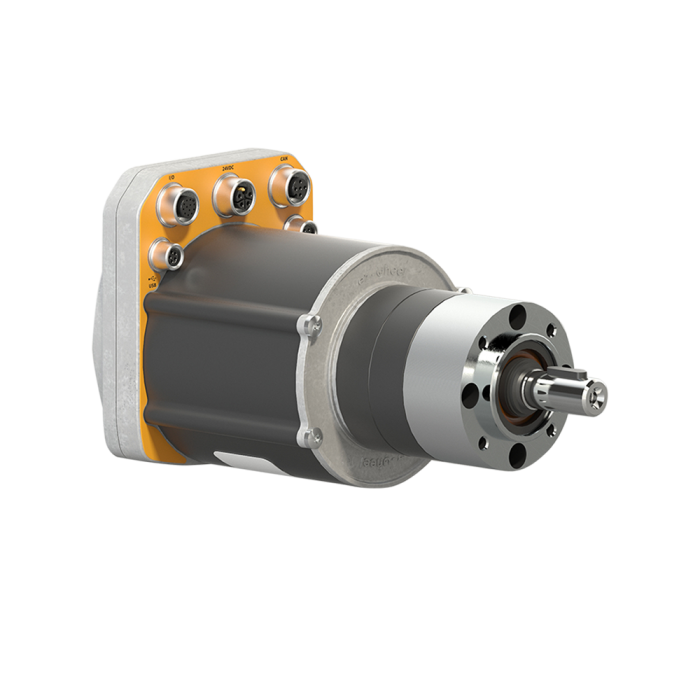
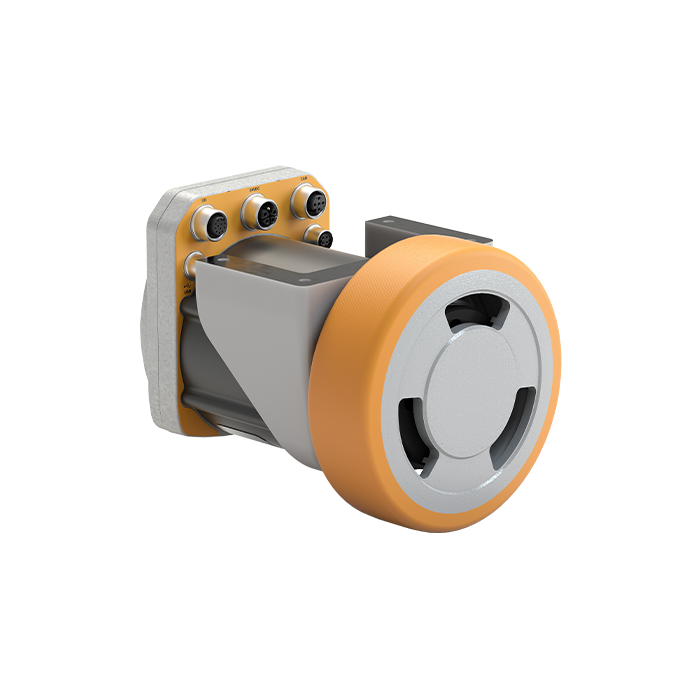
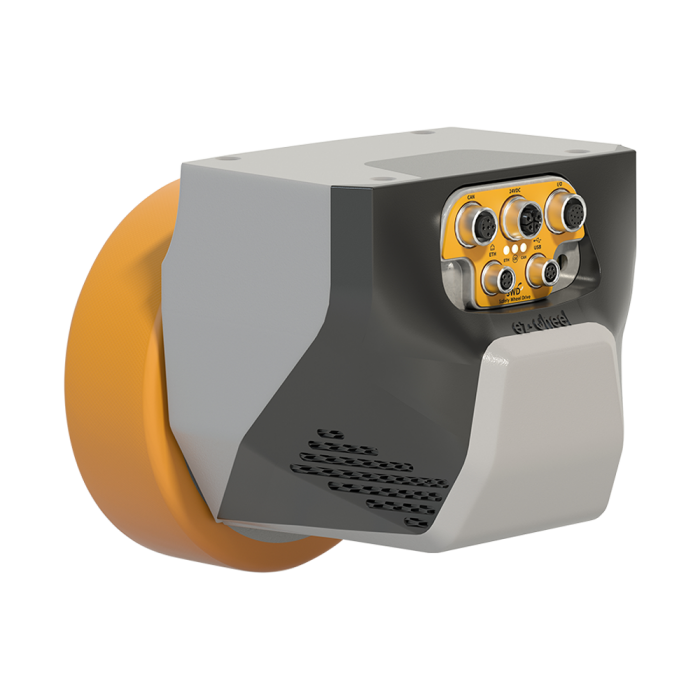
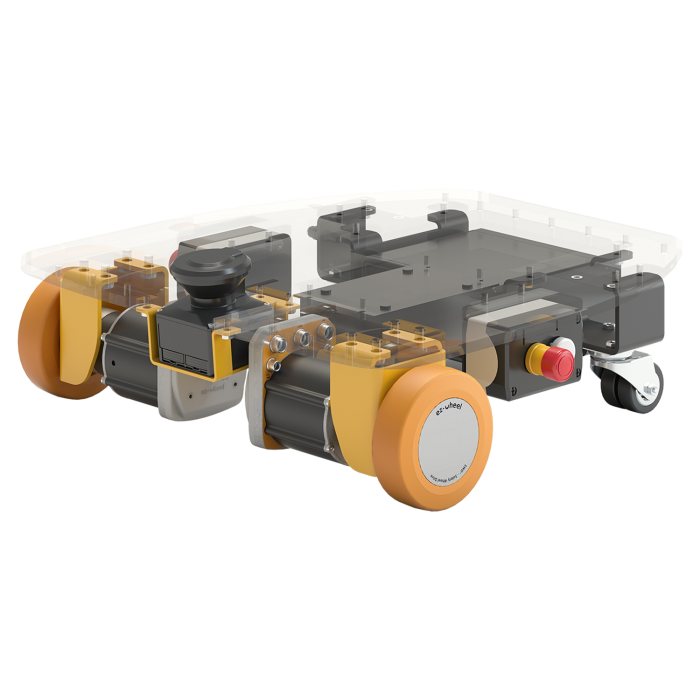
| SWD® Core | SWD® 125 | SWD® 150 | SWD® StarterKit |
| Safety gear motor | Medium duty Safety Wheel Drive | Heavy duty Safety Wheel Drive | Development kit for AGV and AMR |
Users should regularly inform themselves about updates of this driver (Activating GitHub notifications with 'Watch', 'All activity' button on top of this page).
- SWD® drive
- Ubuntu 22.04 (Jammy Jellyfish) or Ubuntu 20.04 (Focal Fossa)
- dbus-x11
- CAN bus communication established bewteen the IPC and the SWD® drive
It is available for the following platforms:
- ARM 32-bits, i.e. armhf debian packages (only for Ubuntu 20.04 focal), for ARM 32 bits machines
- ARM 64-bits, i.e. arm64 debian packages, for ARM 64 bits machines, since version 0.2.6
- AMD 64-bits, i.e. amd64 debian packages, for x86 64 bits machines